1月6日,電氣工程學(xué)院第34期“經(jīng)緯韻”研究生學(xué)術(shù)思想講壇在千佛山校區(qū)電力樓四樓報(bào)告廳成功舉辦。講壇邀請(qǐng)到英國(guó)格拉斯哥大學(xué)工程學(xué)院助理教授藍(lán)江林以“學(xué)習(xí)賦能的自主系統(tǒng):控制、驗(yàn)證、監(jiān)控和交互”為題開(kāi)展分享。講壇由電氣工程學(xué)院劉彥華助理研究員主持。

藍(lán)江林教授以“學(xué)習(xí)賦能自主系統(tǒng)的全生命周期保障”為核心主題,整合控制設(shè)計(jì)、形式化驗(yàn)證、運(yùn)行時(shí)監(jiān)控、機(jī)器人-環(huán)境交互等關(guān)鍵技術(shù)維度,構(gòu)建起一套完整的技術(shù)體系,凸顯“性能提升”與“安全保障”并重的核心研發(fā)邏輯。
藍(lán)江林教授提出“學(xué)習(xí)與控制理論融合”的創(chuàng)新路徑,分享了數(shù)據(jù)驅(qū)動(dòng)模型預(yù)測(cè)控制、兩級(jí)強(qiáng)化學(xué)習(xí)模型預(yù)測(cè)控制等核心技術(shù)。針對(duì)混合車(chē)輛隊(duì)列控制難題,數(shù)據(jù)驅(qū)動(dòng)模型預(yù)測(cè)控制可有效應(yīng)對(duì)人類(lèi)駕駛行為的不確定性,相較于傳統(tǒng)自適應(yīng)巡航控制系統(tǒng)(ACC),能有效規(guī)避碰撞風(fēng)險(xiǎn);在環(huán)島交互駕駛的復(fù)雜場(chǎng)景中,兩級(jí)強(qiáng)化學(xué)習(xí)模型預(yù)測(cè)控制可將碰撞率降至1%-2%,顯著優(yōu)于主流算法;面向奶牛場(chǎng)清糞的實(shí)際作業(yè)場(chǎng)景,其團(tuán)隊(duì)研發(fā)的糞便清潔機(jī)器人監(jiān)督強(qiáng)化學(xué)習(xí)方案,通過(guò)全局進(jìn)化調(diào)度與自適應(yīng)執(zhí)行器的協(xié)同配合,實(shí)現(xiàn)了安全高效自主作業(yè)。

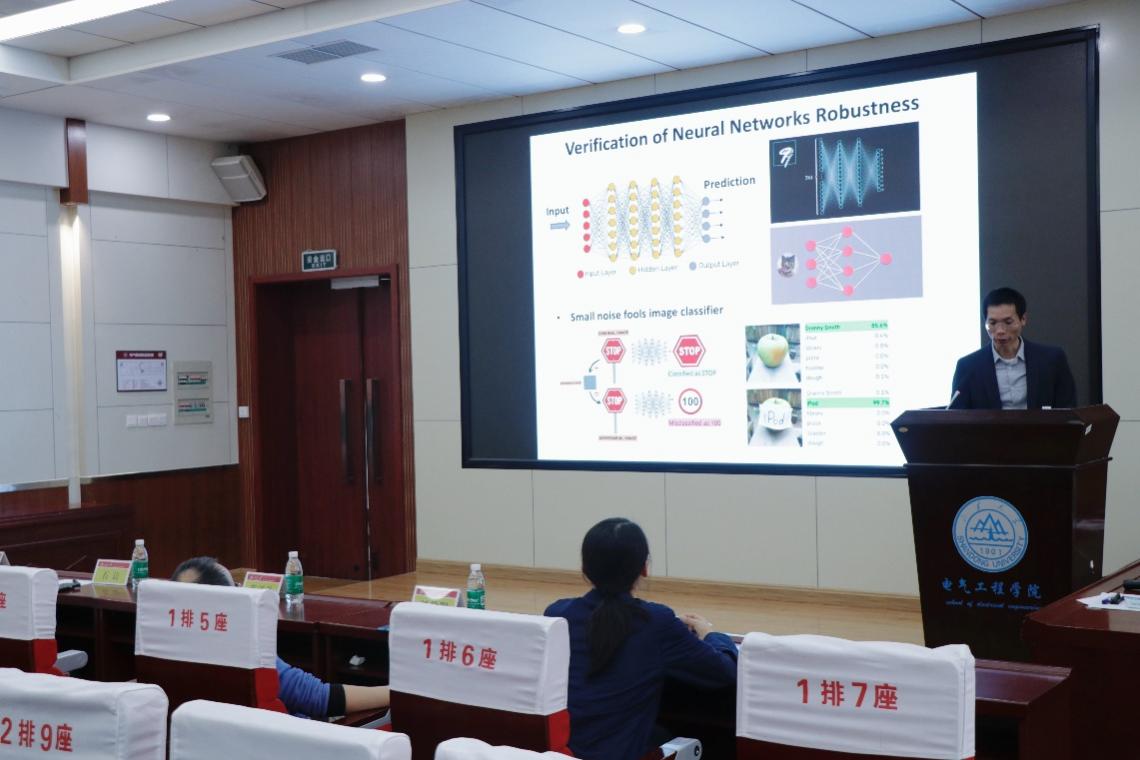
藍(lán)江林團(tuán)隊(duì)針對(duì)深度學(xué)習(xí)模型中原始圖像被添加微小對(duì)抗性噪聲后可能出現(xiàn)分類(lèi)誤判的痛點(diǎn)問(wèn)題展開(kāi)研究,將神經(jīng)網(wǎng)絡(luò)魯棒性驗(yàn)證轉(zhuǎn)化為輸入擾動(dòng)下的可達(dá)性分析,通過(guò)自研工具包可精準(zhǔn)排查這類(lèi)安全隱患,避免系統(tǒng)因誤判引發(fā)碰撞等風(fēng)險(xiǎn)。
報(bào)告尾聲,藍(lán)江林教授與在場(chǎng)師生就自主系統(tǒng)的約束學(xué)習(xí)難點(diǎn)、復(fù)雜場(chǎng)景適配性等問(wèn)題展開(kāi)深入交流,耐心解答了師生在科研方向選擇、技術(shù)落地路徑等方面的疑問(wèn),現(xiàn)場(chǎng)討論氛圍熱烈。

最后,與會(huì)老師與嘉賓合影留念,第34期“經(jīng)緯韻”研究生學(xué)術(shù)思想講壇在熱烈的掌聲中圓滿(mǎn)結(jié)束。

藍(lán)江林,英國(guó)格拉斯哥大學(xué)工程學(xué)院講師(長(zhǎng)聘助理教授),利弗休姆信托青年學(xué)者(Leverhulme Trust Early Career Fellow),人工智能和機(jī)器人實(shí)驗(yàn)室主任,帝國(guó)理工學(xué)院榮譽(yù)研究員。2024年瓦赫寧根大學(xué)訪(fǎng)問(wèn)科學(xué)家,2023年卡內(nèi)基梅隆大學(xué)機(jī)器人研究所訪(fǎng)問(wèn)教授。2017-2022年謝菲爾德大學(xué)自動(dòng)化系、拉夫堡大學(xué)航空與汽車(chē)工程系、帝國(guó)理工學(xué)院計(jì)算機(jī)系博士后。2017年博士畢業(yè)于赫爾大學(xué)。研究方向?yàn)闄C(jī)器學(xué)習(xí)、優(yōu)化理論和自動(dòng)控制等技術(shù)及其在系統(tǒng)安全、智能交通、機(jī)器人等方面的應(yīng)用。在Springer發(fā)表學(xué)術(shù)專(zhuān)著一本,在主流學(xué)術(shù)期刊和會(huì)議上發(fā)表文章70余篇,包括Automatica, IEEE Transactions on Automatic Control, IEEE Transactions on Intelligent Transportation Systems, NeurIPS,AAAI, IFAC Safeprocess等。曾獲2025年ACM MM會(huì)議最佳論文獎(jiǎng)。現(xiàn)任International Journal of Adaptive Control and Signal Processing編輯(Editor),IFAC Safeprocess技術(shù)委員會(huì)成員。
